您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 產地類別 | 進口 | 應用領域 | 化工,電子/電池 |
|---|---|---|---|
| 產地 | 德國 | 品牌 | 西門子 |
人機界面(HumanMachine Interaction,簡稱HMI),是人與計算機之間傳遞、交換信息的媒介和對話接口,是計算機系統的重要組成部分。是指人和機器在信息交換和功能上接觸或互相影響的領域或稱界面所說人機結合面,信息交換,功能接觸或互相影響,指人和機器的硬接觸和軟觸,此結合面不僅包括點線面的直接接觸,還包括遠距離的信息傳遞與控制的作用空間。
 |
| 參考價 | 面議 |
更新時間:2022-02-24 11:41:25瀏覽次數:437
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
 |
 |
西門子6ES7155-5AA00-0AC0
在OB1中將DriveLib_S7_1200_1500中的SINA_Speed(FB285)功能塊拖拽到編程網絡中(此功能塊只能與標準報文1配合使用),進行速度控制:
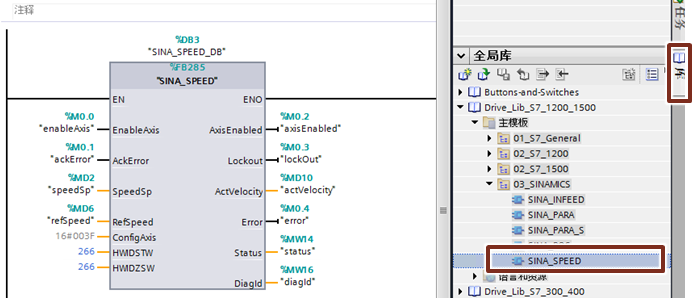
注意:功能塊管腳HWIDSTW及HWIDZSW的賦值請參看下圖:
4. SINA_SPEED功能塊輸入輸出參數說明
輸入參數:
| 輸入信號 | 類型 | 含義 |
|---|---|---|
| EnableAxis | BOOL | =1,驅動使能 |
| AckError | BOOL | 驅動故障應答 |
| SpeedSp | REAL | 轉速設定值[rpm] |
| RefSpeed | REAL | 驅動的參考轉速[rpm],對應于驅動器中的p2000參數 |
| ConfigAxis | WORD | 默認設置為16#003F,說明參看下表 |
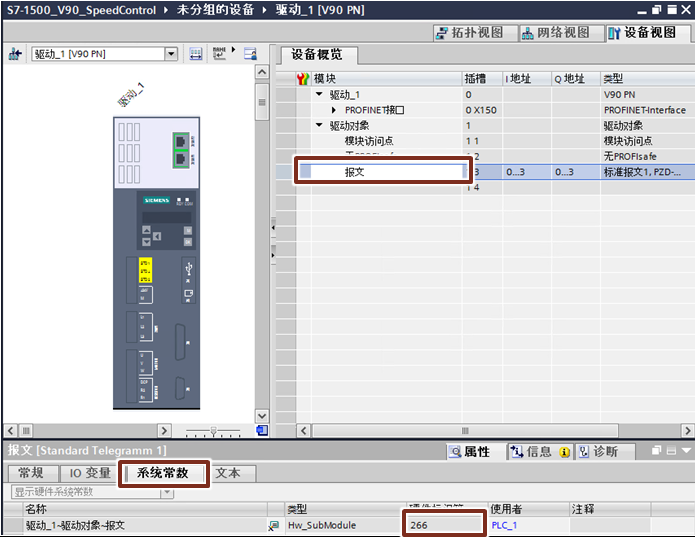
| HWIDSTW | HW_IO | V90設備視圖中報文1的硬件標識符 |
| HWIDZSW | HW_IO | V90設備視圖中報文1的硬件標識符 |
ConfigAxis的各位說明:
| 位 | 默認值 | 含義 |
|---|---|---|
| 位0 | 1 | OFF2 |
| 位1 | 1 | OFF3 |
| 位2 | 1 | 驅動器使能 |
| 位3 | 1 | 使能/禁止斜坡函數發生器使能 |
| 位4 | 1 | 繼續/凍結斜坡函數發生器使能 |
| 位5 | 1 | 轉速設定值使能 |
| 位6 | 0 | 打開抱閘 |
| 位7 | 0 | 速度設定值反向 |
| 位8 | 0 | 電動電位計升速 |
| 位9 | 0 | 電動電位計降速 |
輸出參數:
| 輸出信號 | 類型 | 含義 |
|---|---|---|
| AxisEnabled | BOOL | 驅動已使能 |
| LockOut | BOOL | 驅動處于禁止接通狀態 |
| ActVelocity | REAL | 實際速度[rpm] |
| Error | BOOL | 1=存在錯誤 |
| Status | INT | 16#7002:沒錯誤,功能塊正在執行 16#8401: 驅動錯誤 16#8402: 驅動禁止啟動 16#8600: DPRD_DAT錯誤 16#8601: DPWR_DAT 錯誤 |
| DiagID | WORD | 通信錯誤,在執行SFB 調用時發生錯誤 |
方法三 PLC通過IO地址直接控制V90 PN
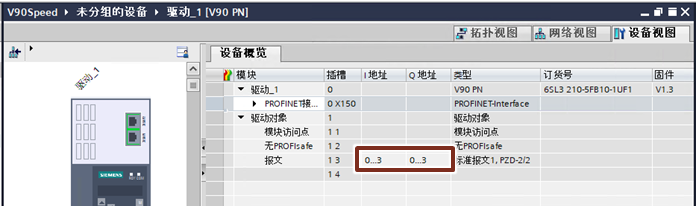
此種控制方式無需的程序塊,直接給定速度。V90使用標準報文1,項目及網絡配置步驟與方法一相同。通過對輸出的個控制字進行驅動器的起停控制、第二個控制字可以電機運行的速度。
V90的輸出地址可從設備視圖中查看:
在OB1中調用MOVE命令,發送對驅動的控制字及速度給定:
1. 通過個控制字進行驅動器的起停控制(16#047E->16#047F)

2. 通過第二個控制字可以電機運行的速度(十六進制16#4000,即十進制的16384對應 p2000 速度參數值)

例如,V90 PN的p2000=3000rpm,如果SpeedSetpoint設置為十進制的8192(即十六進制的16#2000),則表示速度給定為1500r
這些功能碼是對四個數據區位輸入、位輸出、寄存器輸入、寄存器輸出進行訪問的,如圖 4 所示。
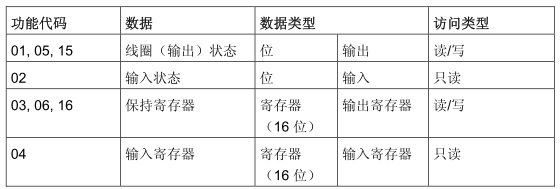
圖4 訪問的數據區
Modbus地址由起始的數據類型代號和地址偏移量組成。功能碼決定對Modbus地址進行操作類型,其可根據需要傳輸的數據類型和個數來決定,如圖 5 所示。
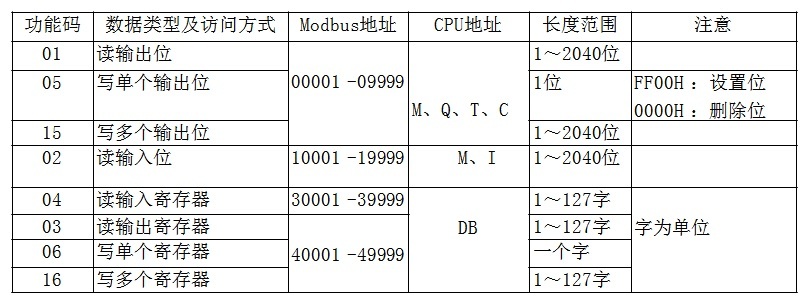
圖5 MODBUS 地址對應關系
 注意:在傳輸消息楨中,用戶使用的地址是0為基準,而對應的Modbus地址是1為基準,如FC16功能碼時以16進制的0000為起始地址,對應的寄存器是從40001開始。
注意:在傳輸消息楨中,用戶使用的地址是0為基準,而對應的Modbus地址是1為基準,如FC16功能碼時以16進制的0000為起始地址,對應的寄存器是從40001開始。
MODBUS RTU 傳輸模式:消息楨中的每個8位分成2個4位16進制的字符。
每個字符幀格式(11位),如圖 6 所示。

圖6 字符幀格式
注意:如果無奇偶校驗位,停止位是2位。
消息幀格式,如圖 7 所示。

西門子6ES7155-5AA00-0AC0
應用
除了現有的集成數字量輸入/輸出之外,數字擴展模塊還可以提供更多的數字量輸入/輸出使用選項s。
這為用戶提供了下列優勢:
適應性:
使用可以根據需要混合的信號模塊,用戶可以使其控制器準確地滿足相關任務的要求。這可以避免產生不必要的投資。可以使用帶有 8 個、16 個和 32 個輸入/輸出通道的模塊
在空間有限的情況下,或只需要少數附加輸入/輸出的情況下,可以使用信號板。通過信號板可以對 S7-1200 CPU 進行模塊化擴展。這不會增加控制器所需的安裝空間
靈活性:
如果任務后續有所擴展,可以升級控制器。更新用戶程序非常簡單。
設計
信號模板
信號模塊具有與基本設備相同的設計特點:
安裝在 DIN 導軌上:
模塊安裝在右側 CPU 旁邊的導軌上,相互電氣、機械地連接,并且通過滑塊機構連接到 CPU。
直接安裝:
水平或垂直安裝在 DIN 導軌上或使用集成的鉆孔直接安裝在控制柜中
由于所有數字模塊均配備可拆卸的連接端子(“獨立接線”),所以更換方便。
信號板
信號板直接插到每個 S7-1200 CPU 前面的插座中。
功能
S7-400
大量功能可支持用戶對 S7-400 進行編程、調試和維護:
高速指令執行。
用戶友好的參數分配
人機界面:
S7-400 的操作系統中集成了用戶友好的 OCM 服務。
診斷功能和自檢:
CPU 的智能診斷系統可連續檢查系統功能并記錄錯誤和特定系統事件。
密碼保護。
模式選擇開關
系統功能
SIMATIC S7-400 符合以下國內和國際標準:
CE 標志
UL 認證
CSA 認證 或 cULus 認證
FM 認證
ATEX 認證
C-Tick、EMC 標記,適用于澳大利亞和新西蘭
IEC 61131-2
船級社的船用認證
ABS(美國船級社)
BV(法國船級社)
DNV(挪威船級社)
GL(德國勞氏船級社)
LRS(英國勞氏船級社)
Class NK(日本船級社)
有關詳細信息,請參見手冊《S7-400 自動化系統 S7-400 模塊技術規格》。
人機界面(HumanMachine Interaction,簡稱HMI),是人與計算機之間傳遞、交換信息的媒介和對話接口,是計算機系統的重要組成部分。是指人和機器在信息交換和功能上接觸或互相影響的領域或稱界面所說人機結合面,信息交換,功能接觸或互相影響,指人和機器的硬接觸和軟觸,此結合面不僅包括點線面的直接接觸,還包括遠距離的信息傳遞與控制的作用空間。
人機結合面是人機系統中的中心一環節,主要由安全工程學的分支學科安全人機工程學去研究和提出解決的依據,并過安全工程設備工程學,安全管理工程學以及安全系統工程學去研究具體的解決方法手段措施安全人機學。它實現信息的內部形式與人類可以接受形式之間的轉換。凡參與人機信息交流的領域都存在著人機界面。