 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 產地類別 | 進口 | 應用領域 | 化工,電子/電池 |
|---|---|---|---|
| 產地 | 德國 | 品牌 | 西門子 |
PID調節有很多種方法,以上僅是建議步驟,也并未考慮微分作用,客戶依據實際情況靈活調節,同時可以參考反饋與給定的曲線圖
用戶經常會遇到這樣的問題:嘗試了很多組PID參數,都無法滿足控制器的要求, 此時需要考慮PID的采樣時間是否適合當前系統。采樣時間就是對反饋進行采樣的間隔。短于采樣時間間隔的信號變化是不能測量到的。
 |
| 參考價 | 面議 |
更新時間:2022-02-24 11:41:25瀏覽次數:326
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
|
 |
西門子6ES7468-3BB50-0AA0
建議PID參數調節步驟:
(1)前提條件:反饋信號是否穩定,執行機構是否正常以及控制器的正反作用。(確保PID在自動模式下)
(2)積分時間設置為無窮大INF(或9999.9),此時積分作用近似為0;將微分時間設置為0.0,此時微分作用為0 。然后開始調節比例作用,逐步增大比例增益
(3)當過程變量達到給定值且在給定值上下波動,將調好的比例系數調整到50%~80%后,由大到小減小積分時間,直到過程值與設定值相等或無限接近
PID調節有很多種方法,以上僅是建議步驟,也并未考慮微分作用,客戶依據實際情況靈活調節,同時可以參考反饋與給定的曲線圖
用戶經常會遇到這樣的問題:嘗試了很多組PID參數,都無法滿足控制器的要求, 此時需要考慮PID的采樣時間是否適合當前系統。采樣時間就是對反饋進行采樣的間隔。短于采樣時間間隔的信號變化是不能測量到的。采樣時間過短,兩次實測值的變化量太小,也不合適,而且增加PLC的運算負擔;采樣間隔過長,將會引起有用信號的丟失,使系統品質變差,不能滿足擾動變化比較快、或者速度響應要求高的場合。除此以外,也有可能是系統自身的問題,無法調節到穩定,例如, 不規律的干擾,或者反饋信號不穩定。
在開始PID自整定調整前,整個PID控制回路必須工作在相對穩定的狀態。
穩定的PID是指過程變量接近設定值,輸出不會不規則的變化,且回路的輸出值在控制范圍中心附近變化。
問題與解決方法:
1.PID輸出總是輸出很大的值,并在這一區間內調節變化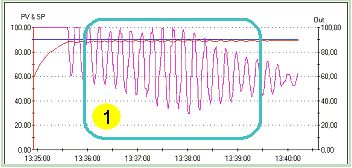
產生原因:
解決方法:降低增益值并且/或選擇短一些的掃描時間
2.過程變量超過設定值很多(超調很大)
產生原因:積分時間可能太高
解決方法:降低積分時間
3.得到一個非常不穩定的PID
產生原因:
解決方法:
4.如何獲取一組合適的參數,實現快速并穩定的PID控制?
PID調節過程中,用戶通常需要做多次的參數調節才能獲得的控制效果。從下面反饋(過程變量)與給定之間的曲線圖中,可以看到黃色曲線較理想。用戶可以將調節的PID反饋與給定曲線與下圖中對比,并修改相關參數(但是因為現場情況不一樣,用戶還需具體問題具體對待,下圖中的建議僅供參考:

反饋與給定曲線
1.超調過大,減小比例,增大積分時間
2.迅速變化,存在小超調
3.實際值緩慢接近設定值,并且無超調的達到設定值
4.增益系數太小和/或微分時間太長
5.益系數太小和/或積分時間太長
WinCC 中沒有與S7-200 SMART CPU 通信的驅動,所以 WinCC 與 S7-200 SMART CPU 之間通過以太網的通信,只能通過 OPC 的方式實現。S7-200 SMART CPU 作為 OPC 的 Sever 端,只需設置 IP 地址即可。
上位機作為 OPC 的 Client 端,通過 SIMATIC NET 軟件建立 PC Station 來與 S7-200 SMART 通信。
建立好 PC Station 后,WinCC中的實現步驟如下:
1. 建立所有WinCC中要用到的變量
首先在 OPC Scout中建立好所有 WinCC 中要用到的變量,步驟見OPC Scout 測試。
2. 添加新的驅動
打開 WinCC 軟件新建一個項目,用鼠標右鍵點擊“變量管理”,快捷菜單中選擇“打開”。
在打開的“WinCC Configuration Studio ”窗口中,鼠標右鍵“變量管理”,在快捷菜單中選擇“添加新的驅動程序”,添加“OPC”驅動。如圖1.所示。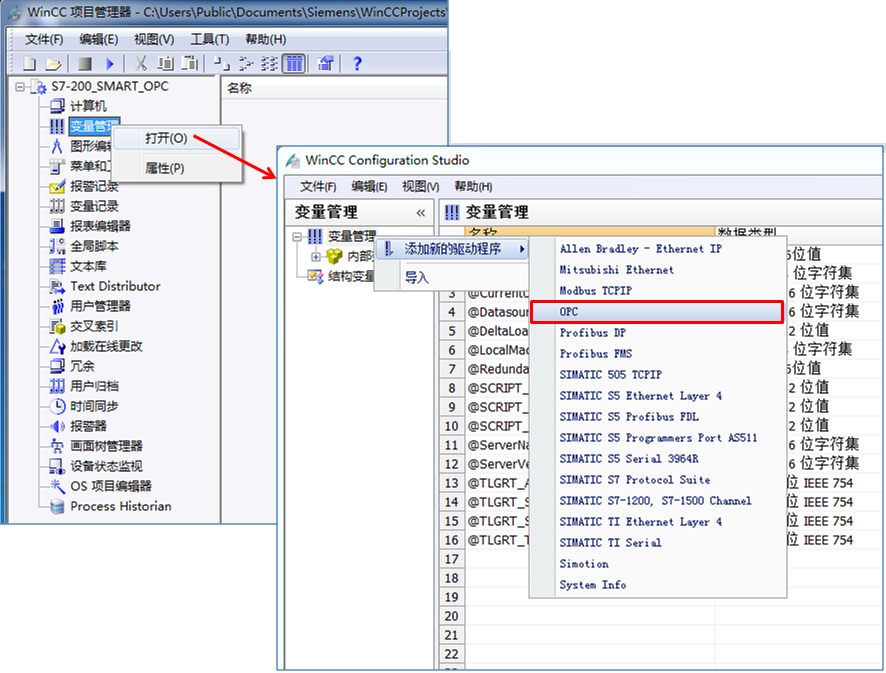
圖1. 添加一個新的驅動"OPC"
3. 在 WinCC 中搜索及添加 OPC Scout 中定義的變量
首先用鼠標右鍵“OPC Groups” ,在快捷菜單中點擊“系統參數”。在彈出“OPC 條目管理器”窗口中,選擇“OPC.SimaticNET.1”,然后點擊“瀏覽服務器”按鈕。
在彈出的“過濾標準”窗口中選擇“下一步” 進行搜索。如圖2.所示。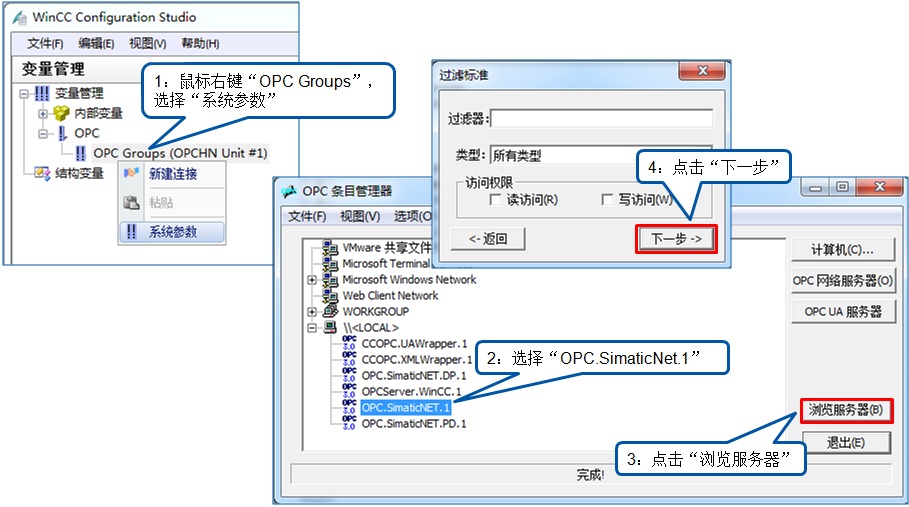
圖2.選擇服務器瀏覽
4. 建立新連接并添加所需變量
在變量列表中選擇所需要的變量,點“添加條目”按鈕添加所需變量,此時會自動要求你建立一個新連接,并將變量添加到這個連接中,如圖3.所示。
如果需要添加多個變量,按上述步驟重復添加即可。
圖3.添加變量并建立連接
成功添加完變量后,WinCC 中變量管理中將顯示已經添加的 OPC 連接和變量,如圖4.所示。
圖4.從OPC Scout中成功添加變量
5. WINCC 創建畫面并監控變量
WINCC 中新建畫面,并添加“輸入/輸出 域”,并為其選擇 OPC 變量,如圖5.所示。 
圖5.創建 WINCC 畫面
激活 WINCC ,即可測試 WINCC 與 S7-200 SMART OPC 通訊。
S7通信是S7系列PLC基于MPI、PROFIBUS、ETHERNET網絡的一種優化的通信協議,主要用于S7-300/400PLC之間的通信。
經過測試發現S7-300/400通過集成的PN口或CP343-1/CP443-1與S7-200 SMART PLC 之間的S7通信也是可以成功的, 但是需要S7-300/400側編程調用PUT/GET指令。
注意:
1.S7-200 SMART CPU 與S7-300/400 CPU 之間的S7通信未經西門子測試,本文檔僅供客戶測試使用,使用該種通信方式所產生的任何危險需要有客戶自己承擔!
2.S7-200 SMARTPLC V2.0 版本才開始支持PUT/GET通信,V1.0版本的CPU需要升級固件后方可支持PUT/GET。
3. S7-300/400若采用CP通信時,則需要采用Standard或Advanced類型通信模塊,CP343-1 Lean模塊不支持。
4.本文僅介紹S7-300集成PN口與S7-200 SMART CPU S7通信。
S7通信是S7系列PLC基于MPI、PROFIBUS、ETHERNET網絡的一種優化的通信協議,主要用于S7-300/400PLC之間的通信。
S7-300/400通過以太網接口與S7-200 SMART PLC 之間的S7通訊經過測試是可以成功的,但是需要S7-300/400側編程調用PUT/GET指令,見表1所示。
表 1 PUT和GET :
| S7-400 | S7-300 | 描述 | 簡要描述 |
| SFB 14 | FB 14 | 讀數據 | 單邊編程讀訪問。 |
| SFB 15 | FB 15 | 寫數據 | 單邊編程寫訪問。 |
S7-300/400根據使用通信接口(集成的PN口或CP343-1/CP443-1)不同,調用的功能塊來源也不同。
通信接口為S7-300 集成PN接口時,需要使用Standard Library中PUT/GET指令,如圖1所示。
圖1 S7-300PN接口需采用Standard Library
通信接口為S7-300 CP通信模塊時,需要使用SIMATIC_NET_CP 庫中PUT/GET指令,如圖2所示。
圖2 S7-300 CP模塊接口需采用SIMATIC_NET_CP庫
S7-400 CPU不區分通信接口,需要使用System Function Blocks 中的SFB14/SFB15指令塊,如圖3所示。
圖3 S7-400 需采用SFB程序塊
本文以采用1個315-2PN/DP,1個S7-200 SMART PLC為例,介紹它們之間的S7通信。
在STEP7中創建一個新項目,項目名稱為S7-300-SMART。插入1個S7-300站,在硬件組態中插入CPU 315-2 PN/DP。如圖4所示。 
圖4 STEP7 項目中插入S7-300站點
設置CPU 315-2PN/DP的IP地址:192.168.0.1,如圖5所示。硬件組態完成后,即可下載該組態。 
圖5 設置CPU PN IP地址
打開“NetPro”設置網絡參數,選中CPU 315-2PN/DP,在連接列表中建立新的連接。步驟如圖6所示。 
圖6 NetPro組態視圖中插入新連接
選擇 Unspecified 站點,選擇通訊協議 S7 connection,點擊 Apply,如圖7所示。 
圖7 組態新連接
在彈出的S7 connection屬性對話框中,勾選 Establish an active connection,設置Partner address:192.168.0.2(S7-200 SMART PLC IP 地址),如圖8所示。 
圖8 設置S7連接參數
點擊 "Address Details" ,再彈出來的對話框設置 Partner 的 Slot 為1,如圖9所示。點擊 OK即可關閉該對話框。 
圖9 設置“address details”參數
網絡組態創建完成后,需要編譯,如圖10所示。 
圖10 保存并編譯連接
網絡組態編譯無錯,鼠標先點擊 CPU 315-2PN/DP ,然后點擊下載按鈕下載網絡組態,步驟如圖11所示。 
圖 11 下載組態連接
可以通過SFB/FB 14 "GET",從遠程CPU中讀取數據。
S7-300:在REQ的上升沿處讀取數據。在REQ的每個上升沿處傳送參數ID、ADDR_1和RD_1。在每個作業結束之后,可以分配新數值給ID、ADDR_1和RD_1參數。
S7-400:在控制輸入REQ的上升沿處啟動SFB。在此過程中,將要讀取的區域的相關指針(ADDR_i)發送到伙伴CPU。遠程伙伴返回此數據。在 下一個SFB/FB調用處,已接收的數據被復制到組態的接收區(RD_i)中。必須要確保通過參數ADDR_i和RD_i定義的區域在長度和數據類型方面 要相互匹配。
通過狀態參數NDR數值為1來指示此作業已完成。只有在前一個作業已經完成之后,才能重新激活讀作業。遠程CPU可以處于RUN或STOP工作狀態。如果 正在讀取數據時發生訪問故障,或如果數據類型檢查過程中出錯,則出錯和警告信息將通過ERROR和STATUS輸出表示。
通過使用SFB/FB 15 "PUT",可以將數據寫入到遠程CPU。
S7-300:在REQ的上升沿處發送數據。在REQ的每個上升沿處傳送參數ID、ADDR_1和SD_1。在每個作業結束之后,可以給ID、ADDR_1和SD_1參數分配新數值。
S7-400:在控制輸入REQ的上升沿處啟動SFB。在此過程中,將指向要寫入數據的區域(ADDR_i)的指針和數據(SD_i)發送到伙伴CPU。 遠程伙伴將所需要的數據保存在隨數據一起提供的地址下面,并返回一個執行確認。必須要確保通過參數ADDR_i和SD_i定義的區域在編號、長度和數據類 型方面相互匹配。
如果沒有產生任何錯誤,則在下一個SFB/FB調用時,通過狀態參數DONE來指示,其數值為1。只有在后一個作業完成之后,才能再次激活寫作業。遠程 CPU可以處于RUN或STOP模式。如果正在寫入數據時發生訪問故障,或如果執行檢查過程中出錯,則出錯和警告信息將通過ERROR和STATUS輸出 表示。
打開SIMATIC 315 PN-1的OB1,在OB1中依次調用FB14,FB15如圖12、圖13所示:
圖12 FB14調用
表2.FB14參數說明 :
參數 | 描述 | 數據類型 | 存儲區 | 描述 |
REQ | INPUT | BOOL | I、Q、M、D、L | 上升沿觸發調用功能塊 |
ID | INPUT | WORD | M、D、常數 | 地址參數ID |
NDR | OUTPUT | BOOL | I、Q、M、D、L | 為1時,接收數據成功 |
ERROR | OUTPUT | BOOL | I、Q、M、D、L | 接收到新數據 |
STATUS | OUTPUT | WORD | I、Q、M、D、L | 故障代碼 |
S7-300: | IN_OUT | ANY | M、D I、Q、M、D、 | 從S7-200 SMART的數據地址中讀取數據;V區數據對應DB1。 |
S7-300: | IN_OUT | ANY | S7-300:M、D | 本站接收數據地址 |

圖13 FB15調用
表3.FB15參數說明 :
參數 | 描述 | 數據類型 | 存儲區 | 描述 |
REQ | INPUT | BOOL | I、Q、M、D、L | 上升沿觸發調用功能塊 |
ID | INPUT | WORD | M、D、常數 | 地址參數 |
DONE | OUTPUT | BOOL | I、Q、M、D、L | 為1時,發送完成 |
ERROR | OUTPUT | BOOL | I、Q、M、D、L | 為1時,有故障發生 |
STATUS | OUTPUT | WORD | I、Q、M、D、L | 故障代碼 |
S7-300: | IN_OUT | ANY | M、D I、Q、M、D、 | 從S7-200 SMART的數據地址中讀取數據;V區數據對應DB1。 |
S7-300: | IN_OUT | ANY | S7-300:M、D S7-400 I、Q、 | 本站發送數據地址 |
西門子6ES7468-3BB50-0AA0
如果程序中某些定時器或計數器的設定值過大,為了縮短調試時間,可以在調試時將它們減小,模擬調試結束后再寫入它們的實際設定值。在設計和模擬調試程序的同時,可以設計、制作控制臺或控制柜,PLC之外的其他硬件的安裝、接線工作也可以同時進行。
西門子PLC的MPI通訊詳解隨著科技的進步,智能化芯片的發展逐漸成熟起來設備的智能化程度也相應提高,隨之智能化設備之間基于開放標準的現場總線技術構成的自動化控制系統也逐漸成熟起來。于是西門子PLC除了使用工業以太網和profibus。

這一功能的設定,可根據實際情況在有效和無效中選擇一項即可。與之有關的功能是轉差補償控制,其作用是為補償由負載波動而引起的速度偏差,可加上對應于負載電流的轉差頻率。這一功能主要用于定位控制。變頻器調試必設參數有哪些。控制意義是什么。節能控制風機水泵都屬于減轉矩負載,即隨著轉速的下降,負載轉矩與轉速的平方成比例減小,而具有節能控制功能的變頻器設計有V/f模式,這種模式可改善電動機和變頻器的效率,其可根據負載電流自動降低變頻器輸出電壓,從而達到節能目的,可根據具體情況設置為有效或無效。

在我們常用的編程、組態、通訊還用到了MPI、ASI等技術。這些技術協議實現西門子PLC主機與智能從站之間的通訊,甚至兼容符合第三方產品的通訊協議。西門子通訊大致有MPI網絡通訊、PROFIBUS網絡通訊、工業以太網通訊這三種。
西門子PLC的MPI網絡通訊MPI叫多點接口通信,一般用于小范圍、小點數現場級通訊,可實現西門子PLC的操作面板(TP/OP)和上位機之間的數據交換,例如西門子PLCs7-200/300/400,它的通訊速率19.2Kbit-12Mbit,多可連接32個接點,通訊距離50m以內。

刪除工作存儲器中由SFC創建的數據塊;剩余的數據塊具有來自裝入存儲器的預置值。復位過程映像和所有定時器計數器和位存儲器,不管它們是否具有保持性分配。OB中的程序執行一次然后循環程序開始執行。●在熱啟動中,在程序中斷處重新開始執行程序不復位定時器計數器和位存儲器)。在啟動時所有數據標志存儲器定時器計數器過程映像及數據塊的當前值被保持,OB中的程序執行一次。然后程序從斷點處斷電,CPUSTOP)恢復執行。