 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網


SM323, 16DI/DO, DC24V, 0,5A
SIMATIC S7-300,數字量模塊SM 323,光電隔離,16 DI和16 DO, 24V DC,0.5A,總電流 4A,40針石家莊西門子模塊代理商6ES7 323-1BL000AA0
 |
| 參考價 | 面議 |
更新時間:2019-03-28 10:00:53瀏覽次數:471
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
 |
 |
 ?S7 - 300的模擬量I/O模塊包括模擬量輸入模塊SM 331、模擬量輸出模塊SM 332、模擬量輸入/輸出模塊SM 334和SM 335。
?S7 - 300的模擬量I/O模塊包括模擬量輸入模塊SM 331、模擬量輸出模塊SM 332、模擬量輸入/輸出模塊SM 334和SM 335。
1.模擬量變送器
生產過程中大量的連續變化的模擬量需要用PLC來測量或控制。有的是非電量,例如溫度、壓力、流量、液位、物體的成分和頻率等。有的是強電電量,例如發電機組的電流、電壓、有功功率和無功功率、功率因數等。變送器用于將傳感器提供的電量或非電量轉換為標準量程的直流電流或直流電壓信號,例如DC 0~10V和DC 4~20 mA。
2.SM 331模擬量輸入模塊的基本結構
模擬量輸入模塊用于將模擬量信號轉換為CPU內部處理用的數字信號,其主要組成部分是A/D (Analog/Digit)轉換器(見圖2-49中的ADC)。模擬量輸入模塊的輸入信號一般是模擬量變送器輸出的標準量程的直流電壓、直流電流信號。SM 331也可以直接連接不帶附加放大器的溫度傳感器(熱電偶或熱電阻),這樣可以省去溫度變送器,不但節約了硬件成本,控制系統的結構也更加緊湊。
一塊SM 331模塊中的各個通道可以分別或分組使用電流輸入或電壓輸入,并選用不同的量程。大多數模塊的分辨率(轉換后的二進制數字的位數)可以在組態時設置,轉換時間與分辨率有關。
圖2-49 模擬量輸入模塊示意圖
模擬量輸入模塊由多路開關、A/D轉換器(ADC)、光隔離元件、內部電源和邏輯電路組成。各模擬量輸入通道共用一個A/D轉換器,用多路開關切換被轉換的通道,模擬量輸入模塊各輸入通道的A/D轉換過程和轉換結果的存儲與傳送是順序進行的。
各個通道的轉換結果被保存到各自的存儲器,直到被下一次的轉換值覆蓋。可以用裝入指令“L PIW…”來訪問轉換的結果。
3.傳感器與模擬量輸入模塊的接線
傳感器與模擬量輸入模塊的連接分為下列各種情況:連接帶電隔離的傳感器、連接不帶電隔離的傳感器、連接電壓傳感器、連接電流傳感器、連接電阻和熱電阻、連接帶內部補償的熱電偶、連接帶外部補償的熱電偶。
各種情況的接線方式和注意事項見隨書光盤中的《S7 - 300模塊數據設備手冊》第4章。
4.S7 -300模擬量輸入模塊的技術參數
除了1KF01 - 0AB0,其余模塊均用紅色LED指示組故障。模塊與背板總線之間有隔離,熱電偶、熱電阻輸入時進行了線性化處理。
使用屏蔽電纜時大距離為200m,輸入信號為50 mV或80 mV時,大距離為50m。
5.模擬量輸入模塊的掃描時間
通道的轉換時間由基本轉換時間和模塊的電阻測試和斷線監控時間組成,基本轉換時間取決于模擬量輸入模塊的轉換方法(例如積分法和瞬時值轉換法)。積分轉換法的積分時間直接影響轉換時間,可以在STEP 7中設置積分時間。
掃描時間是指模擬量輸入模塊對所有被激活的模擬量輸入通道進行轉換和處理的時間的總和。如果模擬量輸入通道進行了通道分組,還需要考慮通道組之間的轉換時間。
6.模擬量輸入模塊的量程卡
模擬量輸入模塊的輸入信號類型用量程卡(或稱為量程模塊)來設置。量程卡安裝在模擬量輸入模塊的側面,每兩個通道為一組,共用一個量程卡,圖2-50中的模塊有8個通道,因此有4個量程卡。量程卡插入輸入模塊后,如果量程卡上的標記C與輸入模塊上的箭頭標記相對,則量程卡被設置在C位置。各位置對應的測量類型和測量范圍都印在模擬量模塊上。
常規PID控制是過程控制中應用較為廣泛的一種控制規律,具有原理簡單、使用方便和穩定等特點。但常規PID在控制過程中的參數都是固定不變的,若用于調節*空調這樣具有非線性、不確定性、滯后性和干擾性等問題的系統,常規PID控制很難達到控制精度。
因此,本文針對*空調系統將PID和模糊控制相結合,提出了模糊自適應PID控制。模糊控制是用語言歸納操作人員的控制策略,運用語言變量和模糊集合理論形成控制算法的一種控制。模糊控制不需要建立對象的精確數學模型,只要求把現場操作人員的經驗和數據總結成比較完善的語言控制規則,因此它能繞過對象的不確定性、不精確性、噪聲、非線性、時變性以及時滯等影響。模糊控制系統的魯棒性強,尤其適用于非線性、時變、滯后的系統的控制。但是傳統的模糊自適應PID控制初始參數是人為給定的,不能從系統中自動得到,因此本文的創新點在于在傳統模糊自適應PID控制基礎之上增加辨識結構和Bang-Bang控制,對傳統的模糊自適應PID控制初始值進行優化。
7-300的CPU用16位的二進制補碼表示模擬量值。其中位為符號位S,“0”表示正值,“1”表示負值,被測值的精度可以調整,取決于模擬量模塊的性能和它的設定參數,對于精度小于15位的模擬量值,低字節中冪項低的位不用。
S7-300模擬量輸入模塊可以直接輸入電壓、電流、電阻、熱電偶等信號,而模擬量輸出模塊可以輸出0~10 V、1~5 V、-10 V~10 V、0~20 mA、4~20 mA等模擬信號。
2、模擬量輸入模塊SM331
模擬量輸入(簡稱模入(AI))模塊SM331目前有三種規格型號,即8AI×l2位模塊、2AI×l2位模塊和8AI×l6位模塊。
SM331主要由A/D轉換部件、模擬切換開關、補償電路、恒流源、光電隔離部件、邏輯電路等組成。A/D轉換部件是模塊的核心,其轉換原理采用積分方法,被測模擬量的精度是所設定的積分時間的正函數,也即積分時間越長,被測值的精度越高。SM331可選四檔積分時間:2.5 ms、16.7 ms、20 ms和l00 ms,相對應的以位表示的精度為8、12、12和14。
西門子PM240-2功率模塊6SL3210-1PE13-2UL1是三相交流 47-63Hz 重過載功率:0.75kW 當 200% 3S,150% 57S, * 240S;環境溫度 -10 至 +50°C;功率 輕過載:1.1kW 當 150% 3S,110% 57S, * 240S;環境溫度 -10 至 +40°C 196x 73x 165(高x寬x深),FSA 防護等級 IP20 不帶控制單元和 操作單元

如何通過USS協議實現西門子S7-1200與G120變頻器的通信
西門子S7-1200 緊湊型PLC在當前的市場中有著廣泛的應用,作為經常與SINAMICS G120系列變頻器共同使用的PLC,其USS通信協議的使用一直在市場上有著非常廣泛的應用。本文將主要介紹如何使用USS通信協議來實現S7-1200與G120變頻器的通信。
1.控制系統原理和接線圖
下圖是本例中所使用的原理和接線圖。

圖1 控制系統原理和接線圖
2.硬件需求
S7-1200 PLC目前有3種類型的CPU:
1)S7-1211C CPU。
2)S7-1212C CPU。
3)S7-1214C CPU。
這三種類型的CPU都可以使用USS通信協議通過通信模塊CM1241 RS485來實現S7-1200與G120變頻器的通信。
本例中使用的PLC硬件為:
1)PM1207電源 ( 6EP1 332-1SH71 )
2) S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
3) CM1241 RS485 ( 6ES7 241 -1CH30 -0XB0 )
4) 模擬器 ( 6ES7 274 -1XH30 -0XA0 )
本例中使用的G120變頻器硬件為:
1) SINAMICS G120 PM240 (6SL3244-0BA20-1BA0)
2) SINAMICS G120 CU240S(6SL3224-0BE13-7UA0)
3) SIEMENS MOTOR (1LA7060-4AB10)
4) 操作面板 ( XAU221-001469)
5) USS 通信電纜 ( 6XV1830-0EH10)
3.軟件需求
1) 編程軟件 Step7 Basic V10.5 ( 6ES7 822-0AA0-0YA0)
4.組態
我們通過下述的實際操作來介紹如何在Step7 Basic V10.5 中組態S7-1214C 和G120變頻器的USS通信。
4. 1 PLC 硬件組態
首先在Step7 Basic V10.5中建立一個項目,如圖2所示。

圖2: 新建S7 1200項目
在硬件配置中,添加CPU1214C和通信模塊CM1241 RS485模塊,如圖3所示。

圖3: S7 1200硬件配置
在CPU的屬性中,設置以太網的IP地址,建立PG與PLC的連接,如下圖所示。
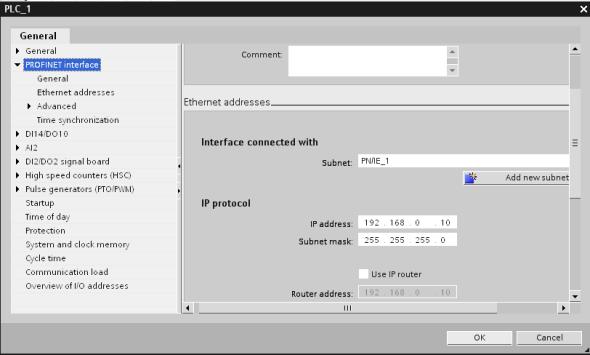
圖4: S7 1200 IP地址的設置
4. 2 G120參數設置
變頻器的參數設置如下表所示。
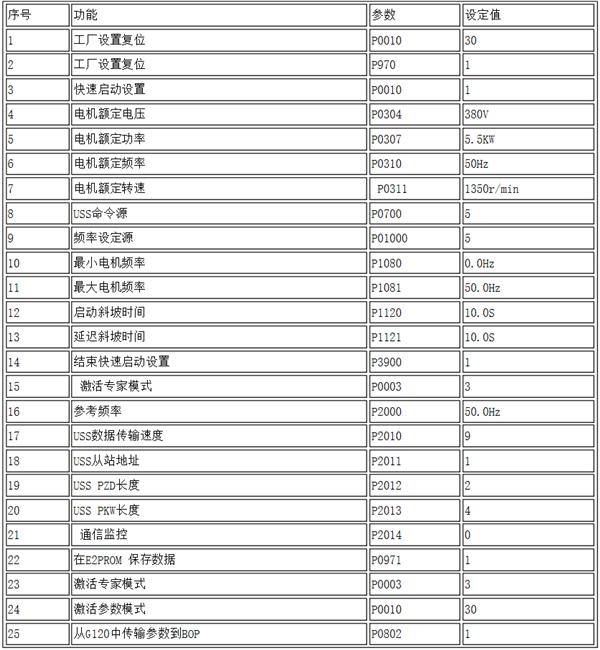
表1 :G120變頻器的參數設置
注意:表1中的17,18,19,20 這四項參數值的設置必須使PLC的參數值與變頻器的參數值相*。而19,20這兩個參數值必須設置成如表1中的值,否則有可能變頻器與S7-1200通信有如下問題:可能不能讀出從變頻器反饋回來的參數值。
5.USS通信原理與編程的實現
5. 1 S7 1200 PLC與G120 通過USS通信的基本原理
S7 1200提供了的USS庫進行USS通信,如下圖所示:
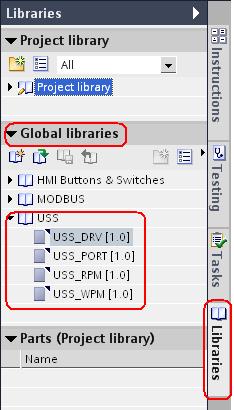
圖5: S7 1200 的USS庫
USS_DRV 功能塊是S7-1200 USS通信的主體功能塊,接受變頻器的信息和控制變頻器的指令都是通過這個功能快來完成的。必須在主 OB中調用,不能在循環中斷OB中調用。
USS_PORT功能塊是S7-1200與變頻器USS通信的接口,主要設置通信的接口參數。可在主OB或中斷OB中調用。
USS_RPM功能塊是通過USS通信讀取變頻器的參數。必須在主 OB中調用,不能在循環中斷OB中調用。
USS_WPM功能塊是通過USS通信設置變頻器的參數。必須在主 OB中調用,不能在循環中斷OB中調用。
這些功能塊與變頻器之間的控制關系如下圖所示:
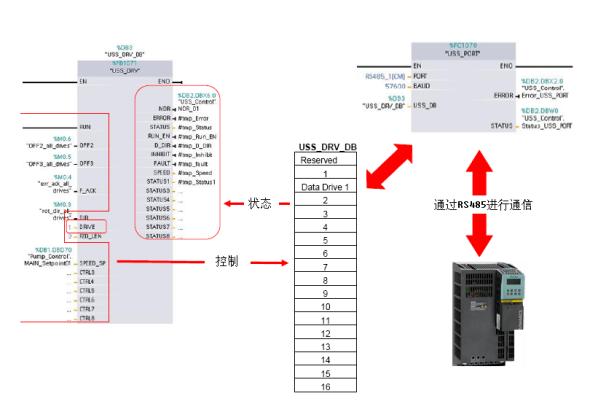
圖6: USS 通信功能塊與變頻器的控制關系
USS_DRV功能塊通過USS_DRV_DB數據塊實現與USS_PORT功能塊的數據接收與傳送,而USS_PORT功能塊是S7-1200 PLC CM1241 RS485模塊與變頻器之間的通信接口。USS_RPM功能塊和USS_WPM功能塊與變頻器的通信與USS_DRV功能塊的通信方式是相同的。
每個S7-1200 CPU多可帶3個通信模塊,而每個CM1241 RS485通信模塊多支持16個變頻器。因此用戶在一個S7-1200 CPU中多可建立3個USS網絡,而每個USS網絡多支持16個變頻器,總共多支持48個USS變頻器。
5. 2 S7 1200 PLC進行USS通信的編程
1.USS通信接口參數功能塊的編程
USS通信接口參數功能塊的編程如下圖所示。
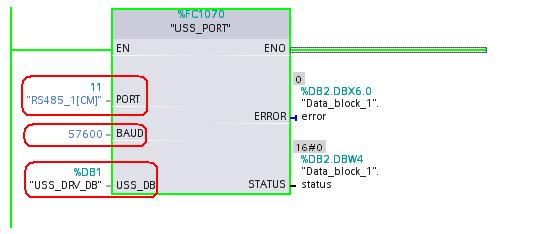
圖7: USS通信接口參數功能塊的編程
USS_PORT功能塊用來處理USS網絡上的通信,它是S71200 CPU與變頻器的通信借口。每個CM1241 RS485模塊有且必須有一個USS_PORT功能塊。
PORT:指的是通過哪個通信模塊進行USS通信。
BAUD:指的是和變頻器進行通行的速率。 變頻器的參數P2010種進行設置。
USS_DB:指的是和變頻器通信時的USS數據塊。每個通信模塊多可以有16個USS數據塊,每個CPU多可以有48個USS數據塊,具體的通信情況要和現場實際情況相聯系。每個變頻器與S7-1200進行通信的數據塊是的。
ERROR:輸出錯誤。
STATUS:掃描或初始化的狀態。
S7-1200 PLC與變頻器的通信是與它本身的掃描周期不同步的,在完成一次與變頻器的通信事件之前,S7-1200通常完成了多個掃描。石家莊西門子模塊代理商6ES7 323-1BL000AA0石家莊西門子模塊代理商6ES7 323-1BL000AA0
USS_PORT通信的時間間隔是S7-1200與變頻器通信所需要的時間,不同的通信波特率對應的不同的USS_PORT通信間隔時間。下圖列出了不同的波特率對應的USS_PORT小通信間隔時間。
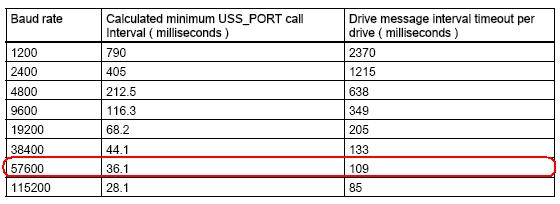
圖8:不同的波特率對應的USS_PORT小通信間隔時間
USS_PORT在發生通信錯誤時,通常進行3次嘗試來完成通信事件,那么S7-1200與變頻器通信的時間就是USS_PORT發生通信超時的時間間隔。例如:如果通信波特率是57600,那么USS_PORT與變頻器通信的時間間隔應當大于小的調用時間間隔,即大于36.1Ms而小于109Ms。S7-1200 USS 協議庫默認的通信錯誤超時嘗試次數是2次。
基于以上的USS_PORT通信時間的處理,我們建議在循環中斷OB塊中調用USS_PORT通信功能塊。在建立循環中斷OB塊時,我們可以設置循環中斷OB塊的掃描時間,以滿足通信的要求。循環中斷OB塊的掃描時間的設置如下圖所示:

圖9:循環中斷OB塊的掃描時間的設置
2.USS_DRV功能塊的編程
USS_DRV功能塊的編程如下圖所示。
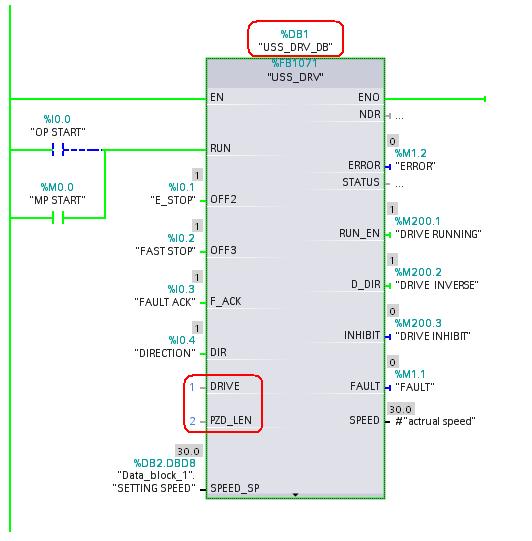
圖10: USS_DRV功能塊的編程
5. 3 S7 1200 PLC進行USS通信的調試
S7-1200 PLC 通過CM1241 RS485模塊與變頻器進行USS通信時,需要注意如下幾點:
當同一個CM1241 RS485 模塊帶有多個(多16個)USS變頻器時,這個時候通信的USS_DB是同一個,USS_DRV功能塊調用多次,每個USS_DRV功能塊調用時,相對應的USS站地址與實際的變頻器要*,而其它的控制參數也要*。
當同一個S7-1200 PLC 帶有多個CM1241 RS485模塊(多3個)時,這個時候通信的USS_DB相對應的是3個,每個CM1241 RS485模塊的USS網絡使用相同的USS_DB,不同的USS網絡使用不同的USS_DB。
當對變頻器的參數進行讀寫操作時,注意不能同時進行USS_RPM和USS_WPM的操作,并且同一時間只能進行一個參數的讀或者寫操作,而不能進行多個參數的讀或者寫操作。
在S7-1200 PLC 與變頻器的USS通信的實際使用過程中,需要根據網絡的現場情況,對問題進行具體的解決。
 |
 |