 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細介紹
西門子6SL3120-1TE15-0AB0
6SL3120-1TE15-0AB0 SINAMICS 單電機模塊 輸入:600V DC 輸出:3AC 400V,5A 內(nèi)部風冷 包含 DRIVE-CLiQ 電纜 組件 涂漆 |
1 簡單抱閘控制特點
S120抱閘控制主要分為簡單抱閘控制和擴展抱閘控制,可根據(jù)應(yīng)用場合不同而靈活選用。本文主要介紹簡單抱閘控制。
S120 簡單抱閘控制的特點主要有:
? 通過順序控制自動激活
? 靜態(tài)P1227(零速P1228)檢測監(jiān)控
? 強制釋放抱閘(p0855,p1215),包括有條件或無條件釋放抱閘
? 無條件關(guān)閉抱閘(p0858 = 1)
? 取消“使能速度控制器”信號后的抱閘應(yīng)用(p0856 = 0)
2抱閘功能描述
“簡單抱閘控制”專門用于電機抱閘的控制。當驅(qū)動不激活時,保持抱閘用于保護驅(qū)動裝置,以免出現(xiàn)不希望的運動,如位能性的負載或垂直運行的負載出現(xiàn)的危險。
釋放和保持抱閘的觸發(fā)命令通過控制單元(CU)的DRIVE-CLiQ 傳送至電機模塊,直接把信號互連到電機模塊上并進行監(jiān)控。然后電機模塊執(zhí)行動作并激活保持抱閘的輸出。可在
SINAMICS S120/S150 參數(shù)手冊(功能圖2701,2704)中看到詳細的順序控制框圖。通過
參數(shù)p1215可配置抱閘控制的運行規(guī)則,圖1所示為簡單抱閘控制的順序圖。
打開抱閘的過程:
(1) 當符合啟動條件后,控制單元發(fā)出ON命令,接觸器開始閉合,設(shè)備開始預充電。完
成后,開始建立勵磁;
(2) 勵磁完成后,打開抱閘的輸出信號為1;
(3) 此處還可以通過p0855=1強迫釋放抱閘命令;
(4) 打開抱閘的輸出信號為1,r0899.12=1, 可以控制抱閘裝置。此時電機并不會立即加
速,否則會出現(xiàn)溜鉤的現(xiàn)象;
(5) 延遲時間p1216到達之后,電機立即加速,直到穩(wěn)定狀態(tài)。 p1216的時間需根據(jù)現(xiàn)
場情況調(diào)節(jié)。
關(guān)閉抱閘的過程:
(1) 當控制單元發(fā)出OFF命令后,電機速度開始下降;
(2) 電機實際速度或設(shè)定速度小于p1226所設(shè)定的值;
(3) 延遲p1227或p1228時間后,關(guān)閉抱閘的輸出信號為1;
(4) 此處還可以通過p0858 = 1強迫輸出關(guān)閉抱閘命令;
(5) 關(guān)閉抱閘的輸出信號為1,r0899.13=1, 可以控制抱閘裝置。此時變頻器輸出電流仍
存在,否則會出現(xiàn)溜鉤的現(xiàn)象;
(6) 延遲時間p1217到達之后,變頻器脈沖封鎖,輸出電流立即降到0。 p1217的時間
需根據(jù)現(xiàn)場情況調(diào)節(jié)。

圖1 簡單抱閘控制的順序圖
3 抱閘調(diào)試過程
如果電機模塊具有內(nèi)部集成的抱閘控制并連接有抱閘裝置時,可通過設(shè)置參數(shù)p1215 = 1激活簡單抱閘控制。
如果電機模塊沒有內(nèi)部集成的抱閘控制,可通過設(shè)置參數(shù)p1215 = 3激活抱閘控制,此時需要將“開閘”或/和“關(guān)閘”信號互聯(lián)到CU的輸出點上,由此輸出點來控制開抱閘。
注意:
? 簡單抱閘控制不能應(yīng)用于維護性的抱閘控制,當應(yīng)用抱閘控制時一定要考慮特殊
的工藝要求和機械條件以保證人員的安全。
? 當電機有抱閘裝置時,設(shè)置P1215=0,在啟動設(shè)備時將導致抱閘裝置的損壞。
? 只有書本型功率單元和模塊型功率單元有安全抱閘繼電器時,才能激活抱閘控制
監(jiān)測(p1278 = 0)。
抱閘配置:
在STARTER或SCOUT調(diào)試軟件中,添加一個驅(qū)動,然后配置驅(qū)動參數(shù)。在圖2所示抱閘配置界面中,根據(jù)實際情況選擇1或者3。

圖2 選擇基本抱閘
在驅(qū)動的目錄樹下選擇“Functions”?“Brake control”,打開抱閘設(shè)置界面,如圖3所示。
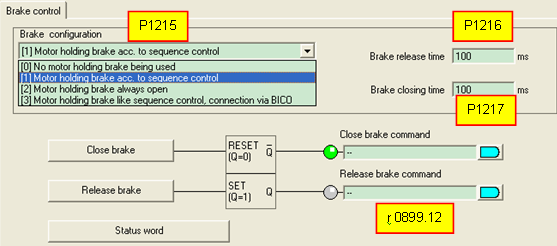
圖3 基本抱閘配置
參數(shù)設(shè)置:
對于參數(shù)p1215,可以有以下幾種設(shè)置方式:
? p1215=0,不使用報閘功能
? p1215=1,基本報閘控制模塊集成的抱閘
? p1215=2,電機報閘一直打開
? p1215=3,外部報閘控制裝置
p1216為釋放抱閘時間,p1217為關(guān)閉抱閘時間。一般地,關(guān)閉抱閘命令和釋放抱閘命令連接一個BICO參數(shù)即可,通常連接r0899.12。
關(guān)閉抱閘配置:
如圖4所示,點擊“Close brake”按鈕,進入關(guān)閉抱閘設(shè)置界面。可以設(shè)置零速檢測閾值(p1266),零速檢測監(jiān)控時間(p1227)和脈沖抑制延遲時間(p1228)。
通過參數(shù)p0858設(shè)置強制關(guān)閉抱閘,可連接至一個開關(guān)量,如果此信號為1,則強制關(guān)閉抱閘。
 西門子6SL3120-1TE15-0AB0
西門子6SL3120-1TE15-0AB0
圖4 關(guān)閉抱閘設(shè)置
釋放抱閘配置:
如圖5所示,點擊“Release brake”按鈕,進入釋放抱閘設(shè)置界面。通過參數(shù)p0855設(shè)置強制釋放抱閘,可連接至一個開關(guān)量,如果此信號為1,則強制釋放抱閘。

圖5 釋放抱閘設(shè)置
4 重要參數(shù)
列出關(guān)于抱閘控制的一些重要參數(shù),可以根據(jù)不同應(yīng)用場合進行靈活設(shè)置:
? r0056.4 勵磁完成
? r0060 CO 設(shè)定值濾波器前的速度設(shè)定值
? r0063 CO 實際值濾波后的實際速度值(伺服)
? r0063[0…2] CO 速度實際值
? r0108.14 CO 擴展抱閘控制
? p0855[C] BI 無條件釋放抱閘
? p0856 BI 速度控制器使能
? p0858 BI 無條件關(guān)閉抱閘
? r0899.12 BO 開抱閘指令
? r0899.13 BO 關(guān)抱閘指令
? p1215 電機抱閘配置
? p1216 釋放抱閘時間
? p1217 關(guān)閉抱閘時間
? p1226 零速檢測閾值
? p1227 零速檢測監(jiān)視時間
? p1228 脈沖抑制延遲時間
? p1278 抱閘控制診斷評估
1 概述
根據(jù)通訊接口的不同,SINAMICS S120的控制單元分兩類:
· 支持PROFINET IO的控制單元:CU310-2 PN,CU320-2 PN
· 支持PROFIBUS DP的控制單元:CU310-2 DP,CU320-2 DP
對于支持PROFIBUS DP通訊的控制單元,可以使用Y-Link模板將CU3x0-2 DP接入到S7-400H冗余系統(tǒng)中。
對于支持PROFINET IO通訊的控制單元,在固件版本V4.8之前,一直沒有相應(yīng)的解決方案。但從固件版本V4.8開始,SINAMICS S120增加了一個新功能,開始支持與S7-400H冗余系統(tǒng)的PROFINET通訊。一個帶有3個CU310-2 PN的S7-400H系統(tǒng)連接示意圖,如圖1-1所示。
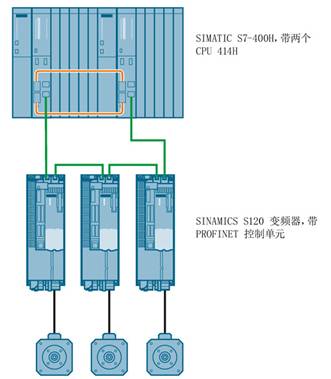
圖1-1 連接示意圖:S7-400H與S120的PROFINET通訊
S7-400H系統(tǒng)由兩個相互冗余的控制器組成,兩個CPU一用一備,雙方通過光纖連接,保持數(shù)據(jù)同步。如果一個CPU故障停機,另一個CPU會立即投用,這大大降低了系統(tǒng)停機的風險,提高了系統(tǒng)可靠性。S120配合S7-400H系統(tǒng)使用時,同樣具有以上優(yōu)點,在一個CPU出現(xiàn)故障時S120無需停機,在切換CPU的過程中,上一個連接的設(shè)定值將被凍結(jié)并仍然有效。
但是,目前這種配置不支持PROFINET IRT模式,不支持設(shè)備共享(Shared Device),而且只能使用控制單元的板載PN接口實現(xiàn)系統(tǒng)冗余。
2 通訊連接與配置
2.1 硬件需求
在SINAMICS S120配合S7-400H系統(tǒng)進行PN通訊時,需要以下硬件:
· SIMATIC S7-400H控制系統(tǒng)
帶有PROFINET接口的H-CPU,型號為 41xH
· SINAMICS S120控制單元
帶PROFINET接口的 控制單元,CU310-2 PN 或 CU320-2 PN
2.2 通訊拓撲
S120與S7-400H的PROFINET冗余通訊連接有兩種拓撲結(jié)構(gòu)。
2.2.1 不使用交換機的通訊拓撲
不使用交換機時,可以將S120控制單元上的兩個PN接口分別與S7-400H系統(tǒng)的兩個CPU相連接,如圖2-1所示。

圖2-1 不使用交換機:S120與S7-400H的連接拓撲
2.2.2 使用交換機的通訊拓撲
可以使用交換機同時與S7-400H系統(tǒng)的兩個CPU相連接,S120控制單元只使用一個PN接口與交換機相連接,如圖2-2所示。

圖2-2 使用交換機:S120與S7-400H的連接拓撲
2.3 硬件組態(tài)示例
使用SIMATIC PCS7軟件可以完成項目硬件組態(tài)和后續(xù)調(diào)試。以2.2節(jié)中圖2-1與圖2-2的拓撲為例,其硬件組態(tài)如圖2-3所示。
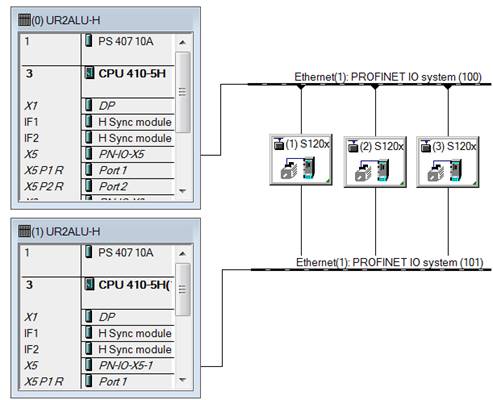
圖2-3 硬件組態(tài)示例
面臨的挑戰(zhàn)
為了在日益激烈的競爭市場中確保盈利要求,制造商需要靈活機智的供應(yīng)鏈,同步的生產(chǎn)流程和實時的工廠可視性。
由于在生產(chǎn)過程中的決定總是會影響到企業(yè)的盈利水平。企業(yè)應(yīng)當統(tǒng)籌考慮生產(chǎn)指標和業(yè)務(wù)績效,以便使自身有能力適應(yīng)或應(yīng)對市場的變化,來增加效率、降低成本、改善客戶滿意度。
這就需要一個綜合集成式的IT基礎(chǔ)設(shè)施,可以控制所有的生產(chǎn)要素,包括物料、設(shè)備、人事、規(guī)范和程序等,并能與業(yè)務(wù)和運營系統(tǒng)相結(jié)合。
解決方案
SIMATIC IT生產(chǎn)套件將業(yè)務(wù)流程模型和一系列高度集成的功能組件相匹配。

它負責生產(chǎn)的管理和執(zhí)行、工廠內(nèi)部的進行與協(xié)調(diào),并規(guī)范整個企業(yè)生產(chǎn),使制造流程與供應(yīng)鏈活動保持*且彌補業(yè)務(wù)系統(tǒng)(如,ERP)和控制系統(tǒng)的信息斷層。
SIMATIC IT生產(chǎn)模型用一系列內(nèi)部規(guī)則進行定義,并使工廠模型可視化,這樣就可以明確各項生產(chǎn)操作。
SIMATIC IT組件是根據(jù)通用的MES標準ISA-95開發(fā)的功能。
他們包括產(chǎn)品定義管理,生產(chǎn)訂單管理,物料管理,工廠績效分析,關(guān)鍵績效指標(KPI)計算,整體設(shè)備效率(OEE),報告,調(diào)度,實驗室信息管理(LIMS),質(zhì)量保證和產(chǎn)品規(guī)范管理,等。
產(chǎn)品優(yōu)勢
SIMATIC IT生產(chǎn)套件連接業(yè)務(wù)系統(tǒng)(ERP)和控制系統(tǒng),在業(yè)務(wù)績效層面上為整個供應(yīng)鏈效率的增加提供實時工廠績效可視化管理。
SIMATIC IT 的建模平臺方法可以讓制造商建立自己的業(yè)務(wù)模型,實現(xiàn)優(yōu)化工廠管理和增加市場反應(yīng)速度。制造商還可以建立模型以更快地生成市場需要的業(yè)務(wù)流程。
此業(yè)務(wù)模型還可以幫助多工廠分布的企業(yè)進行簡便的功能應(yīng)用更新,以獲得快速的投資回報率(ROI)并降低過程中的總體擁有成本(TCO)。
SIMATIC IT生產(chǎn)套件為了實現(xiàn)生產(chǎn)成本優(yōu)化,提供了完整的物料譜系,以及所有成本效益合規(guī)、物料管理和工廠績效分析的雙向可追溯性。

 化工儀器網(wǎng)
化工儀器網(wǎng)